ABLASONIC
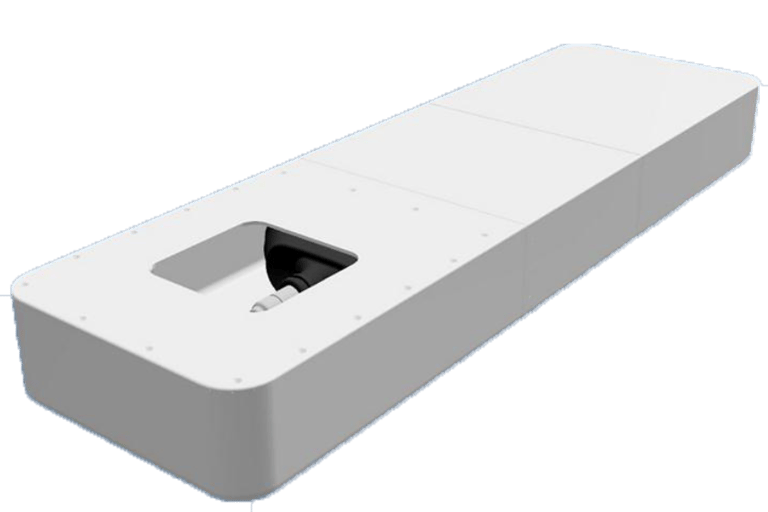
The main objective of the ABLASONIC project was the development and evaluation of a 3-degrees of freedom robotic system for non-invasive Magnetic Resonance Imaging (MRI)-guided focused ultrasound (MRgFUS) surgery. The positioning mechanism offers motion of the ultrasonic source in 2 linear (X and Y) and 1 angular axes to access targets in the abdominal area (e.g., in the liver, kidney, and pancreas). The system comprises 3 single-element FUS transducers that are offset between, thus focusing on different depth within tissue and eliminating the need for motion in the Z-axis. The motion stages are driven by piezoelectric motors and optical encoders were incorporated to provide motion feedback. A navigation software integrating commands for MRI interfacing, robotic motion control, and FUS control was also developed. High accuracy and repeatability of robotic motion was demonstrated through benchtop and MRI experiments. The system was also proven successful in ablating phantoms, as well as ex-vivo and in-vivo animal tissue. Overall, the MRgFUS system can safely operate in the MRI environment for performing robotic-assisted MRgFUS ablation procedures.